Henan Weihua Heavy Machinery Co., Ltd.
Container Gantry Crane,Railway Conainer Gantry Crane,Freight Train Container Crane
Henan Weihua Heavy Machinery Co., Ltd.
Container Gantry Crane,Railway Conainer Gantry Crane,Freight Train Container Crane
Model No.: WH
Brand: Weihua
Certification: Other
Condition: New
Maximum Lifting Weight: 20-50t
Maximum Lifting Height: 15-20m
Operation Form: Cabin
Type: Container Gantry Crane
Main Girder Form: Double Girder
Packaging: Woden Case, Rain Cloth, etc.
Productivity: 300 sets
Transportation: Ocean,Land
Place of Origin: China
Supply Ability: 80 sets per month
Certificate: ISO 9001 ISO 14001 OHSAS 18001 GB/T 19001-2008/ISO 9001: 2008
HS Code: 8426193000
Port: Qingdao,Tianjin,Shanghai
Payment Type: L/C,T/T,D/P
Incoterm: FOB,CFR,CIF,EXW
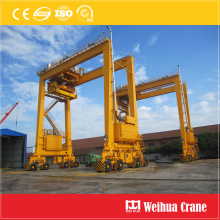
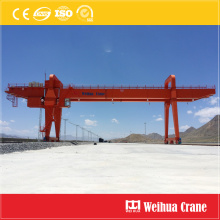
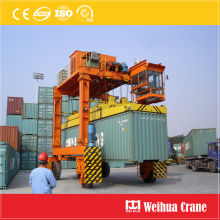
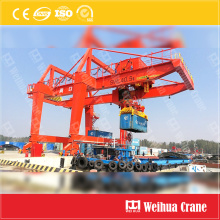
This Rail Mounted Gantry Crane is for container handling at railway freight yard. It has a strong U-type gantry structure, double cantilever with rods, and light self-weight. This railway container Gantry Crane has enough span and space for container handling with a 360° rotating hoisting mechanism. This crane is highly intelligent for automated operation.

Electrical Control System:
1. Digital frequency conversion and PCL control;
2. High Precision Sensor Data Acquisition Technology;
3. Industrial computer data analysis and processing system.

Working Flow of Smart Container Handling:
1. The container handling instructions are sent from the central control room to the working crane.
2. The driver cabin receives the instructions.
3. The crane driver starts the loading and unloading operation by the linkage table touch screen.
4. Touch screen real-time displays the spreader, crane and trolley position.
5. The control system temporarily receive plug-in jobs, while it gives priority to the ongoing job, then perform the plug-in job after finishing the current job.
6. Precise container positioning technology. Machine vision accurately identify the location of container keyhole and read the container number, then intelligent control system adjust the spreader position and deflection angle to realize accuracy locking and precision container stacking.
7. Linkage table touch screen real-time displays the spreader, crane and trolley position.

8. This crane is equipped with PDS system, if the crane position does not correspond to the indication position from the PDS system, the crane does not execute the command, and sends out the alarm information. After the driver moves the crane to the system indication position, the crane continues to execute the handling command.
9. Programmed path planning and obstacle avoidance technology for optimizing path and obstacle avoidance.
10. The use of infrared space scanning carry out real-time scanning of yard container storage situation, and updating yard stacking 3d database. Spreader is controlled by intelligent program to run along the optimal path for intelligent obstacle avoidance to ensure safe working.
11. The central control room receives the completion information feedback of the crane and sends it to the database.



Product Categories : Gantry Crane > Container Crane